Pfeil und Bogen Simulationsaufgabe in Matlab/Simulink
Auf dieser Seite wird ein Simulationsprojekt mit dem Thema "Pfeil und Bogen" vorgestellt.
Dabei steht der Entwurf, die physikalische Beschreibungsform und Aufbau der Simulation mit Hilfe von Matlab/Simulink im Vordergrund.
Am Computer wird die Flugbahn eines Pfeils für bestimmte Abschußparameter unter Einfluß von Störgrößen berechnet, optimiert und angezeigt.
Inhaltsverzeichnis
- 1. Einleitung
- Aufgabenstellung
- Parameter der Simulation
- 2. Der Simulationsvorgang
- Systemvoraussetzungen und Aufruf in Matlab/Simulink
- Übersicht und Startvorgang der Simulation
- 3. Realisierung der physikalischen Grundlagen
- Aufbau und Beschreibung von Pfeil und Bogen
- Das verwendete Raummodell
- Innenballistik
- Außenballistik
- 4. Optimierungsstrategien
- 5. Fazit
- 6. Anhang
1. Einleitung
1.1 Aufgabenstellung
Ziel dieser Simulationsaufgabe ist die physikalische Beschreibung und die Untersuchung des zeitlichen Zusammenhangs der wesentlichen Größen vom Abschuss eines Pfeils mit Hilfe eines Bogens. Dabei sollen die Bogenmechanik, die physikalischen Abläufe und die Flugbahn des Pfeils betrachtet werden. Die Bogenparameter (insbesondere Größe, Auszugslänge und Elastizität) sowie die zugeführte Rückstellkraft bestimmen die Abschussgrößen wie Energien, Kräfte und Winkel. Während der Pfeil durch die Luft fliegt, wird er durch die Luftreibung gebremst und von zufälligen Luftböen abgelenkt (Einfluss von Störgrößen), bis er schließlich auf dem Boden oder bereitgestellten Objekten aufschlägt. Anschließend wird die genaue Position und Entfernung zum Ziel analysiert (Zielscheibe getroffen?). Mit Hilfe eines Optimierungsverfahrens können idealer Abschusswinkel und die benötigte Zuglänge bestimmt und verbessert werden.
Die Aufgabenstellung wird mit Hilfe der Software Matlab und dem Tool Simulink in ein Simulationsmodell umgesetzt, so dass eine möglichst realistische Abbildung für die Auswertung entsteht.
1.2 Parameter der Simulation
Bei jedem Simulationsdurchlauf müssen die wesentlichen Parameter und Größen eingestellt, angepasst und beobachtet werden. Im Wesentlichen können folgende Aspekte betrachtet werden:
Bogenparameter und Abschuss:
- Material, Holz, Steife, Spinwert, Gewicht, Größe
- Abschusswinkel,Biegung
- Rückstellkraft und Auslenkung
- Spannungsenergie (Elastizität)
- Verhalten der Sehne, Schwingung
Der Flug des Pfeils:
- Position des Pfeils (x,y,z), Ausrichtung (Neigung)
- Geschwindigkeit und Beschleunigung (Erdbeschleunigung)
- Kinetische und potentielle Energie
- Reibung der Luft
- Strömungsverhalten des Pfeils (CW-Wert)
- Ablenkung der Flugbahn durch Windböen (Störgröße)
Auftreffen des Pfeils:
- Aufschlagkraft und Geschwindigkeit
- Position und Winkel
- Entfernung zum Ziel (Güte àOptimierungsansätze)
Raummodell und Umgebungsparameter:
- Gravitationskonstante (Erdbeschleunigung)
- Umgebung (Luftdichte)
- Verluste und Skalierungsfaktoren
2. Der Simulationsvorgang
2.1 Systemvoraussetzungen und Aufruf in Matlab/Simulink
- Für das Durchführen der Simulation wird ein PC benötigt, auf dem Matlab (Version 7) mit Simulink (Version 6) installiert ist.
- Das Simulink-Projekt kann durch Öffnen der Datei "pfeil_und_bogen.mdl" geladen werden. Alternativ können folgende Matlab-Scripte aufgerufen werden, die automatisch eine Simulation durchführen und anschließend einige Ergebnisse als Plots präsentieren:
Monte-Carlo-Optimierung: "opti.m"
Flugbahn plotten: "show.m"
2.2.Übersicht und Startvorgang der Simulation
Das Simulink-Modell besteht aus mehreren Blöcken (Subsysteme), die jeweils einen bestimmten Teil des Gesamtprozesses beschreiben. Im obersten Simulink-Modul (Main-Block) werden alle Subsysteme zusammengebunden und mit entsprechenden Startparametern in Form von Konstanten versehen (z.B. Konstanten für den Pfeilradius, Masse, Luftdichte…). Die folgende Abbildung 2‑1: „Struktur des Simulationsmodells“ zeigt den allgemeinen Aufbau des Systems und das Zusammenwirken der einzelnen Komponenten:
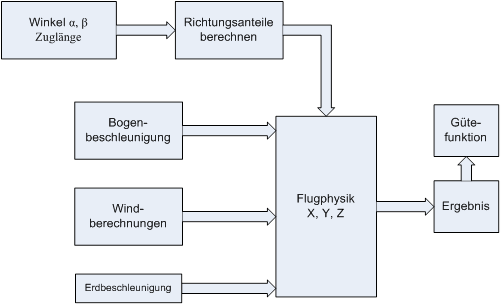
Abbildung 1: „Struktur des Simulationsmodells“
Bevor die Simulation gestartet wird, sollten die wichtigsten Einstellungen und Startbedingungen angepasst werden. Das sind zum Beispiel Konstanten für Abschusswinkel und Zuglänge des Bogens (gelbe Blöcke im Simulink-Blockschaltbild) oder die Position der Zielscheibe (blaue Blöcke im Simulink-Blockschaltbild). Außerdem sollte eine Simulationsdauer (z.B. 15 Sekunden) eingestellt werden. Die Simulation endet dann nach dieser Zeit oder wenn der Pfeil nach Verlassen des Bogens wieder auf die Höhe des Bodens gelangt (Toleranz von -2m). Da das Modell sehr unterschiedliche Zeitkonstanten und Wertebereiche enthält (steifes System), muss ein entsprechendes numerisches Verfahren gewählt werden, beispielsweise „ode23s“.
Es gibt zwei Möglichkeiten den Simulationsvorgang durchzuführen:
<pstyle='margin-left:36.0pt;text-indent:-18.0pt'>1) Starten der Simulation direkt aus dem geöffneten Modell in Simulink über den Menüpunkt „SimulationàStarten“.
2) Aufrufen eines Matlab-Scriptes, so dass die Simulation automatisch durchgeführt wird. Anschließend werden einige interessante Ergebnisse wie z.B. die Flugkurve des Pfeils in verschiedenen Plots dargestellt. Das Matlab-Script kann nach dem Programmstart und wechseln in das entsprechende Verzeichnis, in dem sich das Script befindet, direkt durch Eingabe des Namens („show“) ausgeführt werden. Alternativ steht auch ein Script für Optimierungsansätze zur Verfügung („opti“, siehe dazu auch Abschnitt 4 „Optimierungsstrategien“).
Nach Ausführung der Simulation kann das Ergebnis auf unterschiedliche Weise betrachtet werden. Zum einen befinden sich „Scopes“ an verschiedenen Stellen in den Blockschaltbildern in Simulink, die per Doppelklick den zeitlichen Verlauf der gewählten Größe als Kurve anzeigen. Diese Kurven lassen sich über das Kontextmenü (Rechtsklick auf den Graphen) skalieren (z.B. à Autoscale). Die wichtigsten Prozessgrößen werden außerdem in den Workspace von Matlab geschrieben und können dort mit allen Tools von Matlab analysiert werden.
Wurde die Simulation hingegen durch das Script „show.m“ gestartet, so werden am Ende automatisch verschiedene Plots zur Analyse angezeigt. Das Script kann sehr einfach angepasst werden, wenn andere Parameter der Simulation betrachtet werden sollen.
Auf der nächsten Seite folgt ein Beispiel, wie das Ergebnis eines Simulationsdurchlaufes aussehen kann.
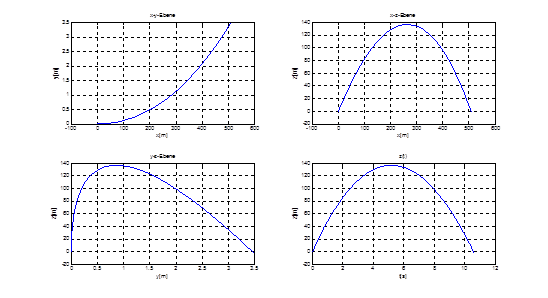
Abbildung 2: „Beispiel-Plots: Verschiedene 2D-Ansichten der Flugbahn“
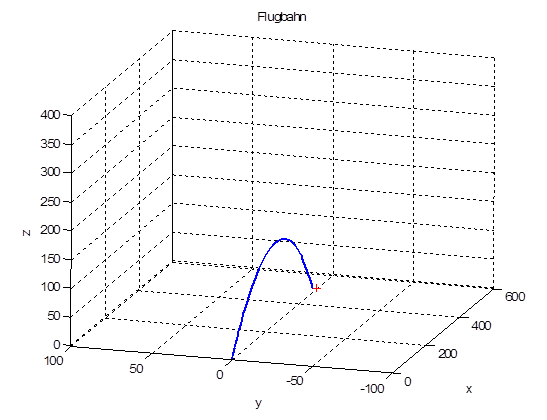
Abbildung 3: „Beispiel-Plot: Die 3D-Flugbahn des Pfeils“
3. Realisierung der physikalischen Grundlagen
Der physikalische Ablauf des Bogenschießens kann in zwei Phasen betrachtet werden:
- Die Innenballistik beschreibt die Beschleunigung des Pfeils auf eine maximale Geschwindigkeit durch den Bogen.
- Die Außenballistik beschreibt die Flugphase des Pfeils mit Beachtung von Erdanziehung, Reibungskräften und Ablenkungen durch Windböen.
Vor Betrachtung der Ballistik, werden im Folgenden zunächst grundsätzliche Parameter von Pfeil und Bogen sowie die Ausgangssituation der Simulation erklärt.
3.1. Aufbau und Beschreibung von Pfeil und Bogen
3.1.1. Der Bogen
Der Bogen hat die Aufgabe, den eingespannten Pfeil auf eine möglichst hohe Geschwindigkeit zu beschleunigen. Dazu muss der Schütze eine bestimmte Spannenergie aufbringen, die beim Loslassen in kinetische Energie umgewandelt wird. Dabei sind verschiedene physikalische Parameter für die Beschreibung und Charakteristik des Bogens zu beachten. Die untenstehende Abbildung 3‑1: „Der Bogen (Quelle: Dissertation Wundballistik)“ zeigt den Aufbau und zugehörige Bezeichnungen der einzelnen Elemente eines Bogens.
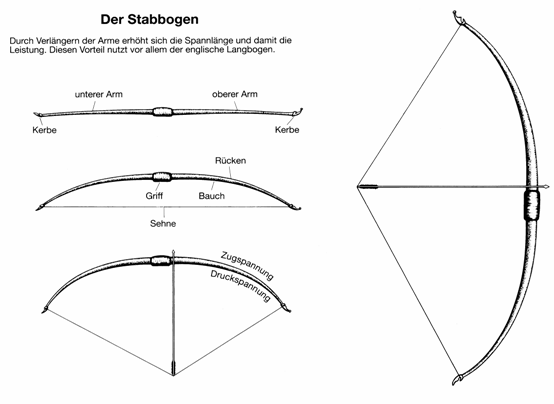
Abbildung 3‑1: „Der Bogen (Quelle: Dissertation Wundballistik)“
Größe, Material und Gewicht des Bogens wurden nicht einzeln modelliert, sondern gehen indirekt über die Federkonstante und Auszugslänge in die Berechnungen ein. Eine genauere physikalische Beschreibung und deren Umsetzung werden in Kapitel 3.3 „Innenballistik“ erläutert.
Die folgenden Modellparameter können für den Bogen angepasst werden:
· Minimale und maximale Auszugslänge werden im Matlab-Script angegeben (da der Pfeil beim Spannen im Bogen entgegen der Flugrichtung gezogen wird, muss hier ein negativer Wert angegeben werden):
len_min = -0.8; % [m] je nach Bogentyp, typisch bis zu -1m
len_max = -0.3; % [m] Null entspricht der Ruhelage; <=0m
· Die Federkonstante des Bogens kann im Blockschaltbild in Simulink angepasst werden. Die Konstante hat den Namen: „Federkonstante_c“, die Angabe erfolgt in N/m (typische Werte liegen bei 150-300N/m).
3.1.2. Der Pfeil
Der Pfeil besteht aus folgenden Komponenten: Schaft, Spitze, Nocke (Kerbe zur Aufnahme der Bogensehne) und Federn (zur Stabilisierung):
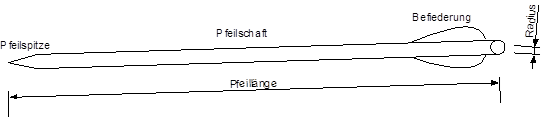
Die Befiederung bewirkt, dass der Pfeil während seines Fluges eine Eigenrotation um die Pfeilachse erfährt. Dies führt zur Stabilisierung der Flugbahn und macht den Pfeil unempfindlicher gegen seitliche Ablenkungen durch Windböen. Physikalisch kann dieses Verhalten z.B. mit Hilfe des „Magnus-Effektes“ beschrieben werden, was aufgrund der Komplexität jedoch nicht im Simulationsmodell umgesetzt wurde. In der Literatur findet man häufig Angaben über „Spine“ (engl. Rückgrat), was als Maß für die Durchbiegung des Pfeils anzusehen ist. Da die Zahlenwerte für diese Angaben jedoch verschiedene Bedeutungen haben können, taucht auch diese Größe nicht explizit im Modell auf.
Folgende Modellparameter können für den Pfeil angepasst werden:
· Masse des Pfeils [kg] (schwere Pfeile werden nicht so stark vom Wind abgelenkt, erfordern aber größere Beschleunigungskräfte, so dass bei gleichem Bogen kleinere Pfeilgeschwindigkeiten erreicht werden)
· Länge und Radius des Pfeils [m]
· Mittlerer CW-Wert des Pfeils [dimensionslos]
(Strömungswiderstandskoeffizient)
3.2. Das verwendete Raummodell
Das Prozessmodell verwendet ein kartesisches dreidimensionales Koordinatensystem für die Simulation. Die Pfeilspitze in Ruhelage (Bogen ist noch nicht gespannt) entspricht dabei dem Ursprung (Nullpunkt). Die z-Achse beschreibt die Bewegung nach oben, die x-Achse den Weg zum Ziel. Zu Beginn wird der Pfeil durch das Spannen des Bogens etwas vom Ziel weg bewegt. Diese Zuglänge (negativer Zahlenwert) muss als Startbedingung in Simulink angegeben werden („Zuglaenge_len“). Die y-Achse beschreibt den Verlauf der seitlichen Ablenkung des Pfeils nach links und rechts.
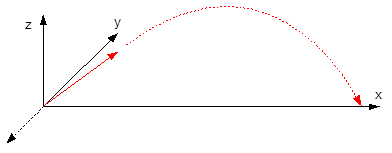
Abbildung 3‑3: „Simulations-Koordinatensystem“
Die Position der Zielscheibe kann in Simulink durch Anpassen der Konstanten „Ziel_x“, „Ziel_y“ und „Ziel_z“ (blaue Farbe) geändert werden. Dabei ist zu beachten, dass keine negativen x- und z-Werte erlaubt sind. Unsinnige Eingaben werden nicht abgefangen.
3.3. Innenballistik
Die Innenballistik beschreibt den Beschleunigungsvorgang des Pfeils durch den Bogen. In den folgenden Kapiteln werden die physikalischen Hintergründe erläutert und die Umsetzung zum Simulink-Simulationsmodell erklärt.
3.3.1. Energie des Bogens (Kraft-Zug-Kurve)
Wenn der Schütze den Bogen spannt, kann der Bogen diese Spannenergie kurzeitig speichern. Beim Loslassen des Pfeils kann diese Energie dann in kinetische Energie umgewandelt werden. Die gespeicherte Energie im Bogen hängt einerseits sehr stark von der Größe des Bogens, andererseits auch vom verwendeten Material ab (Holz, Dicke, Sehne, Form...). Im Allgemeinen gelten folgende mathem. Formeln:
|
Mathematische Beschreibung: |
|
|
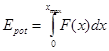
1. Energie des Bogens:
|
|
|
2. Federkonstante: |
|
|
|
Epot = „nutzbare“, kinetische Energie des Pfeils x = der Weg in Kraftrichtung F(x) = ausgeübte Zugkraft entlang des Weges xmax = max. Auszugslänge des Bogens c = Federkonstante
|
Tab. 3‑1: „Mathem. Formeln zur Energie des Bogens“
Die untenstehende Abbildung 3‑4: „Zugkraft-Diagramm“ zeigt drei typische Kraft-Zug-Kurven verschiedener Bogentypen und das Verhalten bei unterschiedlichen Zuglängen. Für das Simulationsmodell wird der Bogen physikalisch mit einer linearen Feder gleicher Maximalkraft und gleicher Ausdehnung verglichen, so dass mit Hilfe unterschiedlicher Federkonstanten verschiedene Bogentypen simuliert werden können. Wie in der Abbildung zu sehen führt diese Näherung lediglich beim Compound-Bogen zu nennenswerten Abweichungen. Die Energie kann grafisch als Fläche unter der Kurve angesehen werden.
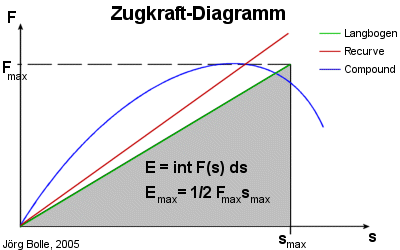
Abbildung 3‑4: „Zugkraft-Diagramm“
3.3.2. Recurvefaktor und Wirkungsgrad
Jedes Pfeil-Bogen-System besitzt einen bestimmten Wirkungsgrad h (Effizienz), der angibt, wie viel Energie vom gespannten Bogen in die Beschleunigung des Pfeils übergeht und wie viele Verluste im Bogen/Sehne auftreten.
Der Recurvefaktor r bezeichnet das Verhältnis der Energie des Bogens aus dem Kraft-Zug-Diagramm (entspricht der Fläche unter der Kurve) zur Energie einer entsprechenden, linearen Feder. Die folgende Tabelle zeigt die dazugehörigen mathem. Formeln:
|
Mathematische Beschreibung: |
|
|
1. Recurvefaktor r:
|
|
|
2. Wirkungsgrad h: |
|
|
3. Kinetische Energie Ekin |
Ohne Reibung/Verluste würde gelten: |
|
|
Epot = potentielle Energie des Bogens Ekin = kinetische Energie des Pfeils Fmax = max. Haltekraft (Zugkraft) Xmax = max. Auszugslänge des Bogens m = Masse des Pfeils v = Geschwindigkeit des Pfeils mA = mitbeschleunigte Bogenmasse k = bogenspezifische Konstante
|


Tab. 3‑2: „Mathem. Formeln für Recurvefaktor und Wirkungsgrad“
Da das Simulationsmodell als lineare Beschreibung mit Federkonstante aufgebaut ist, macht es keinen Sinn eine mathem. Abbildung des Recurvefaktors zu integrieren. Vielmehr kann der Wirkungsgrad direkt als Dämpfungsfaktor im Blockschaltbild „Bogenbeschleunigung“ eingetragen werden (Gain ≤ 1):
- h = 0,5 - 0,7 für Langbögen
- h = 0,7 – 0,9 für Recurve-Bögen
3.3.3. Beschleunigung durch den Bogen
Zu Beginn der Simulation ist der Pfeil im Bogen eingelegt und wird dann beim Abschuss stark beschleunigt. Da der Bogen physikalisch mit einer gespannten Feder verglichen wird, kann das System vom Zeitpunkt des Loslassens bis zu dem Zeitpunkt, wenn der Pfeil den Bogen verlässt, als schwingendes mechanisches System betrachtet werden. In der folgenden Tabelle ist eine Differentialgleichung 2. Ordnung angegeben, die dieses Verhalten beschreibt. Die wichtigsten Größen dabei sind zum einen die Pfeilmasse m [kg], der Bogen mit der äquivalenten Federkonstanten c [N/m] und ein Reibungskoeffizient d [Ns/m], der als die Schwingung dämpfendes Medium eingeht. Die Auslenkung der Schwingung (Schwingungsrichtung) wird entlang der vom Pfeil zurückgelegten, geraden Strecke betrachtet. Die vektorierelle Zerlegung der einzelnen Richtungsanteile erfolgt später in einem weiteren Modul („Richtungsanteile“) und wird im nächsten Kapitel erläutert:
|
Mathematische Beschreibung: |
|
|
Allgemeine DGL. 2. Ordnung der freien gedämpften Schwingung:
|
|
|
Angepasste DGL. 2. Ordnung mit Betrachtung der Newton-Reibung
(die durch Reibung entstehende Kraft ist proportional zum Quadrat der Geschwindigkeit) |
Unter Verwendung der Signumfunktion sgn() ergibt sich:
|
|
Luftreibung: |
|
|
Querschnittsfläche A: |
Pfeil von vorne: |
|
|
x(t) = zurückgelegte Strecke des Pfeils im Bogen d = allgemeiner Reibungskoeffizient c = Federkonstante des Bogens b = Reibungskoeffizient cW = Strömungswiderstandskoeffizient (cW-Wert) ρ = Luftdichte (~1.29kg/m³) A = Querschnittsfläche
|
Tab. 3‑3: „Mathem. Formeln für die Bogenbeschleunigung“
Im Simulationsmodell für Matlab/Simulink wurden die angegebenen Formeln (mit Hilfe der Kelvin-Methode) in ein Blockschaltbild mit dem Namen „Bogenbeschleunigung“ umgesetzt. Die folgende Abbildung 3‑5: „Blockschaltbild Bogenbeschleunigung“ zeigt das Ergebnis:
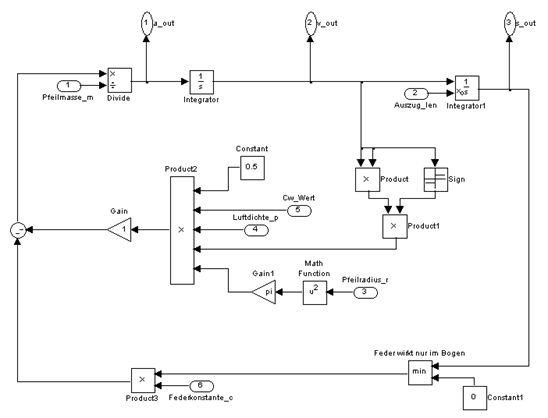
Abbildung 3‑5: „Blockschaltbild Bogenbeschleunigung“
Das richtige Vorzeichen in der Rückkopplung für die Reibungsvorgänge wird auch hier mit Hilfe eines Signum-Blocks realisiert. Der linke Integrator wird mit dem Startwert Null initialisiert, da sich der Pfeil zu Beginn in Ruhelage befinden soll. Der rechte Integrator hingegen wird mit der gewünschten Auszugslänge des Bogens initialisiert (negativer Wert). Nachdem der Pfeil den Bogen verlässt, gilt diese Beschreibungsform der gedämpften Schwingung nicht mehr. Dieser Zeitpunkt ist erreicht, wenn die zurückgelegte Strecke (Ausgang des rechten Integrators) bei Null angekommen ist (es wurde mit negativem Anfangswert gestartet). Der Min-Block zusammen mit der Konstanten Null bewirkt nun, dass kein positiver Anteil mehr zurückgeführt wird. Das System fängt nicht an zu schwingen. Der Pfeil wird weiterhin durch die Luftreibung gebremst, eine zusätzliche Beschleunigung gibt es nicht mehr.
3.3.4. Berechnen der Richtungsanteile
Im vorigen Kapitel wurde erläutert, wie mit einer eingestellten Zuglänge am Bogen (als Anfangsbedingung) die Bewegung, Geschwindigkeit, Beschleunigung etc. simuliert werden kann. Dieses Beschreibungsmodell betrachtet dabei aber nur eine Richtung (entlang der Flugkurve) und ermöglicht keine Simulation der Kurve im dreidimensionalen Raum. So wird z.B. die Beschleunigung des Pfeils in Abhängigkeit der Zeit wiedergegeben v=fkt(t), es kann aber keine Aussage darüber gemacht werden, in welche Richtung im 3D-Raum die Beschleunigung erfolgt.
Die vektorielle Umsetzung der Simulationsgrößen (während der Beschleunigungsphase) in die einzelnen Richtungsanteile wird darum mit Hilfe des folgenden Blockschaltbildes erzeugt:
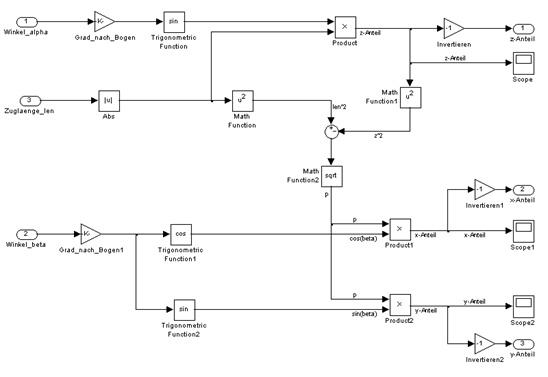
Abbildung 3‑6: „Blockschaltbild Richtungsanteile“
Das für die Umrechnungen verwendete mathematische Modell ist in der untenstehenden Abbildung 3‑7: „Abschussrichtung als 3D-Vektor“ gezeigt. Die Richtung, in die der Pfeil abgeschossen wird, ist durch den roten Vektor definiert. Der Betrag dieses Vektors entspricht genau der Auszuglänge des Bogens.
Vor dem Start der Simulation werden sowohl diese Zuglänge l, als auch die beiden Abschusswinkel α und β angegeben. Daraus gilt es nun die drei Richtungsanteile vx, vy und vz zu bestimmen.
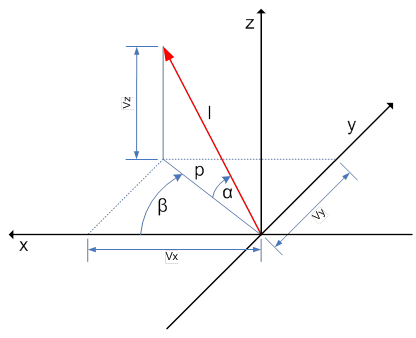
Abbildung 3‑7: „Abschussrichtung als 3D-Vektor“
Die Richtungsanteile können mit Hilfe mathematischer Umformungen berechnet werden. Die entsprechenden Gleichungen und Formeln sind in der folgenden Tab. 3‑4: „Berechnung der 3D-Richtungsanteile“ aufgelistet:
|
Mathematische Beschreibung: |
|
|
x-Anteil:
|
|
|
y-Anteil:
|
|
|
z-Anteil:
|
|
|
Satz des Pythagoras |
|
|
Umwandlung: Grad nach Bogenmaß
|
|
|
|
vx = x-Anteil des Vektors vy = y-Anteil des Vektors vz = z-Anteil des Vektors l = Länge/Betrag des Vektors (entspricht der Zuglänge l mit anderem Vorzeichen) p = Projektion des Vektors auf die xy-Achse α = Winkel, wie steil der Vektor nach oben zeigt (0 entspricht Schuss nach vorne, 90° wäre direkt nach oben) β = Winkel, wie stark nach links (neg) oder rechts (pos) nBog = Winkel im Bogenmaß angegeben nGrad = Winkel in Grad angegeben
|
Tab. 3‑4: „Berechnung der 3D-Richtungsanteile“
Die mathematischen Formeln wurden in das Simulink-Blockschaltbild „Richtungsanteile“ umgesetzt. Die beiden Winkel werden zunächst durch Multiplikation mit dem Faktor π/180° ins Bogenmaß gebracht. Der z-Anteil vz kann direkt wie in der Formel angegeben gebildet werden. Aus dem Ergebnis wird dann zunächst der Faktor p berechnet, mit dem schließlich die beiden anderen Anteile vx und vy verknüpft werden können. Da die Zuglänge negativ ist, müssen die drei Ausgänge am Ende noch invertiert werden.
3.4. Außenballistik
In diesem Kapitel werden die physikalischen Hintergründe der Außenballistik im Zusammenhang mit dem erstellten Simulationsmodell näher erläutert. Dabei werden verschiedene Simulationsparameter während der Flugphase des Pfeils betrachtet (aktuelle Position, Geschwindigkeit, Beschleunigung…).
Unterschiedliche Kräfte wirken während der Simulationsdauer:
· Zu Beginn erzeugt der Bogen eine große Kraft à Anfangsbeschleunigung (Innenballistik)
· Die Erdbeschleunigung wirkt während der gesamten Flugphase
· Die Luftreibung wirkt während der gesamten Flugphase
· Windböen wirken in der Flugphase in unterschiedliche Richtungen („zufällige“ Störgröße)
· Rotation kompensiert die Windböen etwas (wird im Simulationsmodell nicht abgebildet)
In der folgenden Tabelle sind die grundsätzlichen physikalischen Formeln für die Bewegung des Pfeils zusammengestellt, die drei Bewegungsgleichungen der Newtonschen Mechanik:
|
Bewegungsgleichungen: |
|
|
1. Beschleunigung:
|
|
|
2. Geschwindigkeit: |
|
|
3. Strecke / Ort: |
|


Tab. 3‑5: „Bewegungsgleichungen der Newtonschen Mechanik“
Mit Hilfe dieser drei Gleichungen kann die Bewegung des Pfeils dargestellt werden. Da der Schuss in einem dreidimensionalen Raum simuliert werden soll, müssen alle drei Richtungsanteile individuell betrachtet werden. Das Grundmodell für alle Richtungen kommt dabei mit zwei Integratoren aus, wie in Abbildung 3‑8: „Simulink-Grundmodell der Bewegung“ dargestellt:

Abbildung 3‑8: „Simulink-Grundmodell der Bewegung“
Für alle Richtungen kommt jedoch noch eine anteilige Dämpfung durch die Luftreibung dazu, die abhängig von der Geschwindigkeit des Pfeils ist. Für das Simulink-Modell, welches die Höhe (z-Anteil) beschreibt, muss außerdem die Erdbeschleunigung berücksichtigt werden. Um zusätzlich den Einfluss von Windböen zu simulieren, beziehen alle drei Modelle den entsprechenden Richtungsanteil der Beschleunigung des Pfeils durch die Windkraft mit ein. Die folgenden Kapitel beschreiben, wie diese Einflüsse in die Simulink-Modelle eingehen.
3.4.1. Luftwiderstand durch Reibung
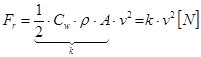
Während der Pfeil durch die Luft fliegt, wird er durch den Luftwiderstand gebremst. Dieser Strömungswiderstand Fr kann wie eine der Bewegungsrichtung entgegengesetzt wirkende Kraft angesehen werden. Die untenstehende Tab. 3‑6: „Formel für den Luftwiderstand“ zeigt die physikalische Formel zur Berechnung dieser Kraft:
|
Mathematische Beschreibung: |
|
|
Strömungswiderstand:
|
|
|
|
Cw = Strömungswiderstandskoeffizient (CW-Wert) ρ = Dichte des Mediums (Luftdichte) A = Querschnittsfläche v = Geschwindigkeit des Pfeils
|
Tab. 3‑6: „Formel für den Luftwiderstand“
Der Strömungswiderstandskoeffizient (CW-Wert) ist eine dimensionslose Größe, die häufig experimentell in einem Windkanal ermittelt wird und sich während des Fluges aufgrund der neuen Lage ändert. Im Simulink-Modell muss der CW-Wert direkt als Wert angegeben werden und bleibt für die gesamte Simulationsdauer konstant. Da die Angriffsfläche in Richtung der Flugbahn sich jedoch nur gering verändert, entstehen hier keine großen Abweichungen. Sie können vernachlässigt werden. Typische CW-Werte für verschiedene Pfeile liegen zwischen 1 und 7. Die folgende Tabelle zeigt gemessene Werte (Quelle: cnentwig):
|
CW-Werte verschiedener Pfeiltypen: |
|
|
ACE |
6.65 |
|
AC |
3.10 |
|
Beman |
1.93 |
|
ACE2 |
3.05 |
Tab. 3‑7: „CW-Werte verschiedener Pfeiltypen“
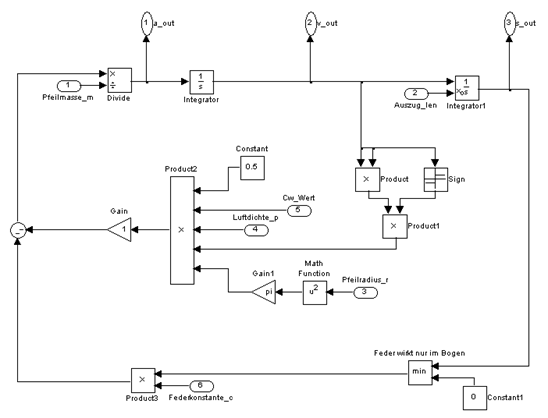
Abbildung 3‑9: „Simulink-Modell für den Luftwiderstand“
Um die Dämpfungskräfte für die einzelnen vektoriellen Richtungskomponenten zu berechnen, kommt die gleiche Formel für den Strömungswiderstand zum Einsatz, mit dem Unterschied, dass nur ein gewisser richtungsabhänger Anteil der Geschwindigkeit einbezogen werden muss. Dies wird näherungsweise dadurch erreicht, dass statt der quadratischen Geschwindigkeit ein linearer Wert verwendet wird, was in den Simulink-Blockschaltbildern umgesetzt wurde.
3.4.2. Ablenkung durch Erdbeschleunigung
Während der gesamten Flugphase des Pfeils wirkt permanent eine konstante Erdbeschleunigung auf den Pfeil. Diese wird mit Hilfe der auf der Erde üblichen Gravitationskonstante beschrieben:
|
Mathematische Beschreibung: |
|
|
Gravitationskonstante:
|
|
|
Zweites Newtonsches Axiom: |
|
|
|
a = Erdbeschleunigung F = Kraftwirkung auf den Pfeil mPfeil = Masse des Pfeils
|
Die folgende Abbildung 3‑10: „Blockschaltbild der z-Komponente mit Erdbeschleunigung“ zeigt, wie die Erdbeschleunigung in Simulink realisiert wurde:
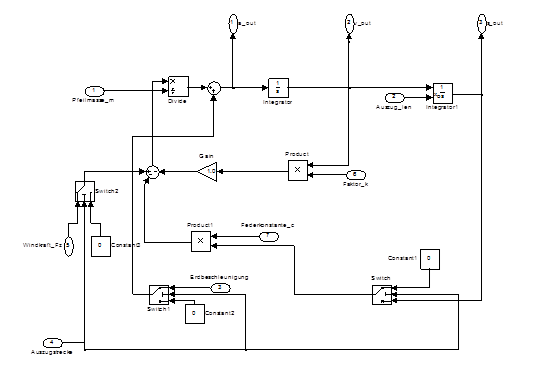
Abbildung 3‑10: „Blockschaltbild der z-Komponente mit Erdbeschleunigung“
Die Abbildung zeigt oben die beiden Integratoren für die Beschreibung der Pfeilbewegung. Im mittleren Rückkopplungszweig wirkt die Luftreibung, da sie der Bewegung entgegengerichtet ist, wird sie mit negativem Vorzeichen zurückgekoppelt. Auch der untere Rückkopplungszweig wird negativ eingeschleust (Strecke ist während der Beschleunigungsphase im Bogen negativ!). Der rechte Switch-Block bewirkt, dass die Rückkopplung nur so lange gültig ist, bis der Pfeil den Bogen verlässt. Danach ist die Schwelle (Threshold) erreicht und die Konstante Null hebt die Rückkopplung auf. Der linke Switch2-Block speist evtl. vorhandene Windbeschleunigung ein, weitere Details dazu folgen im nächsten Kapitel.
Auch die Erdbeschleunigung wird über einen Switch-Block (Switch1) angeschlossen, da sie nur wirken soll, wenn der Pfeil in der Luft ist und den Bogen verlassen hat. Da die Gravitationskonstante mit negativem Vorzeichen angegeben ist, kann sie direkt ohne Negation in den ersten Integrator gehen.
3.4.3. Ablenkung durch den Wind
Um das Simulationsmodell noch realistischer zu gestalten, muss der Einfluss von Windböen, insbesondere die Querwindempfindlichkeit der Pfeile berücksichtigt werden. Eine physikalisch exakte Beschreibung von Windeinflüssen wäre sehr komplex, weswegen hier nur ein angenähertes Windmodell zum Einsatz kommt, das jedoch schon gute Ergebnisse liefert. Es wird davon ausgegangen, dass der Wind eine bestimmte Richtung und Geschwindigkeit hat, die während der Simulationsdauer konstant bleibt. Diese beiden Größen müssen durch einen Windvektor als Startbedingung vor der Simulation angegeben werden:

Die einzelnen Geschwindigkeitskomponenten des Vektors werden dann in dem Modul „Wind“ in die entsprechenden vektoriellen Kräfte umgerechnet, die während des Fluges auf den Pfeil einwirken. Die physikalischen Grundlagen dazu sind in Tab. 3‑8: „Formeln für die einwirkende Windkraft“ angegeben:
|
Mathematische Beschreibung: |
|
|
Einwirkende Windkraft:
|
|
|
|
ρ = Dichte des Mediums (Luftdichte) A = Angriffsfläche für den Wind (s.u.) CW = Strömungswiderstandskoeffizient (CW-Wert) vWindxyz = Windgeschwindigkeit in Richtung x, y ,z
|
|
Angriffsfläche für den Wind
Minimal, wenn Wind die gleiche Richtung wie der Pfeil hat:
Ansonsten: |
|
|
|
r = Radius des Pfeils s = Angriffsfläche entspr. Richtungsanteil (s.u.)
|
Tab. 3‑8: „Formeln für die einwirkende Windkraft“
Da die Richtung und Auslage des Pfeils während des Fluges ständig variiert, verändert sich auch permanent der einwirkende Einfluss der Windböen, der durch die Angriffsfläche A beschrieben wird. Weht der Wind direkt in Pfeilrichtung oder genau entgegengesetzt, so ist die Angriffsfläche minimal (Amin), nämlich nur die Kreisfläche des Pfeils. Ist die Lage des Pfeils jedoch schräg zur Windrichtung, so wird ein bestimmter Anteil der maximalen Fläche des Pfeils vom Wind erfasst. Die folgende Abbildung 3‑11: „Betrachtung der Windrichtung“ verdeutlicht diesen Vorgang. Der Wind weht entlang der x-Achse und erfasst den schräge fliegenden Pfeil an der Angriffsfläche (rot eingezeichnet):
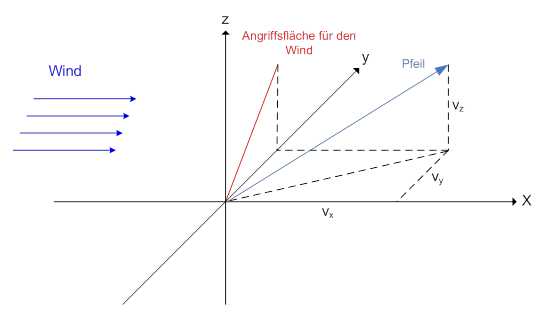
Abbildung 3‑11: „Betrachtung der Windrichtung“
Diese Angriffsfläche muss für alle drei Richtungen des Windvektors getrennt bestimmt werden. Es entspricht jeweils der erfassten Strecke mal der Dicke des Pfeils, (=doppelter Pfeilradius):
|
Mathematische Beschreibung: |
|
|
Strecke für Wind in x-Richtung:
|
|
|
Strecke für Wind in y-Richtung:
|
|
|
Strecke für Wind in z-Richtung:
|
|
|
|
Vxyz = Windgeschwindigkeit in x,y,z-Richtung
|
Tab. 3‑9: „Angriffsfläche des Windes berechnen“
Die untenstehende Abbildung 3‑12: „Blockschaltbild zur Simulation von Windböen“ zeigt die Umsetzung in ein Simulink-Modell. In der oberen Hälfte wird die Angriffsstrecke berechnet und auf den Betrag des Vektors normiert. Die daraus entstehenden Komponenten s_x, s_y und s_z werden dann in der unteren Hälfte mit dem doppelten Pfeilradius multipliziert. Ist das Resultat der Fläche kleiner als (r²·π), wird dieser Wert stattdessen genommen (realisiert durch die Max-Blöcke A_x, A_y und A_z). Dieses Ergebnis wird dann wie in der oben angegeben Formel für FWind mit CW-Wert, Luftdichte und Windgeschwindigkeit verrechnet (links zu sehen). Der jeweils letzte Faktor vor den Ausgängen (Gain4-6, rechts zu sehen) kann zusätzlich zur Skalierung verwendet werden, um den Wertebereich realistischer zu gestalten.
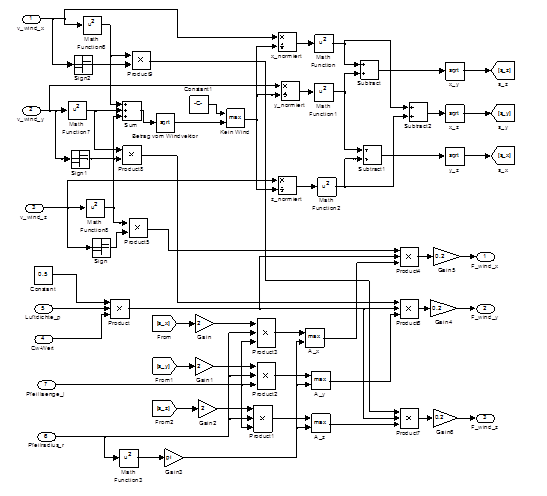
Abbildung 3‑12: „Blockschaltbild zur Simulation von Windböen“
Um die Auswirkung von den Windböen zu veranschaulichen, zeigen die beiden folgenden Abbildungen das Ergebnis einer Simulation. Der Pfeil wurde entlang der x-Richtung abgeschossen, das erste Diagramm beschreibt die Flugbahn von oben betracht (xy-Ebene). Man erkennt, dass der Pfeil nach ca. 550m. um etwa 1m seitlich abgelenkt wurde (in y-Richtung). Das zweite Diagramm skizziert die räumliche Flugbahn.
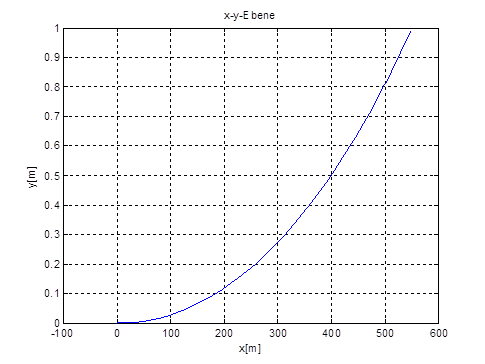
Abbildung 3‑13: „Plot-Beispiel für die Ablenkung der Flugbahn mit Windeinfluss“
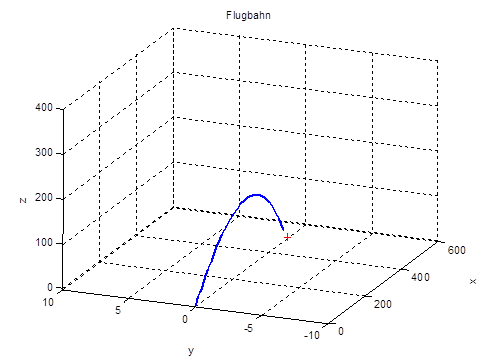
Abbildung 3‑14: „3D-Verlauf der Flugbahn mit Windeinfluss“
4. Optimierungsstrategien
Beim Bogenschießen geht es primär darum, ein entferntes Ziel zu treffen bzw. möglichst dicht an einer entfernten Position im Raum vorbeizuschießen. Mit Hilfe des Matlab-Scripts „opti.m“ werden verschiedene, zufällige Abschusswinkel und Zuglängen des Bogens automatisch simuliert, um ein Optimum zu finden (Monte Carlo Strategie).
Das Script kann durch Aufruf des Namens „opti“ in Matlab ausgeführt werden. Nach dem Start erscheint zunächst die Meldung „Anzahl der Läufe (z.B. 100)“ und der Benutzer wird aufgefordert die gewünschte Zahl einzugeben. Anschließend erzeugt das Script zufällige Startparameter und führt damit einen vollständigen Simulationslauf durch. Dies wird entsprechend der eingegebenen Zahl wiederholt. Am Ende werden die besten Startwerte und die damit erzielt Distanz zum Zielpunkt angezeigt. Es erscheint ein 3D-Plot-Fenster zur Veranschaulichung der genauen Flugbahn.
Bevor das Script in Matlab aufgerufen wird, sollten die Wertebereiche für die Abschusswinkel und Zuglänge des Bogens angepasst werden. Dazu muss das Script z.B. in Matlab oder Notepad geöffnet werden, so dass es editiert werden kann. Die möglichen Optionen stehen in den ersten Zeilen der Datei (es müssen jeweils gültige Intervalle als Wertebereich angegeben werden):
|
Grenzen der Parameter festlegen: |
|
|
alpha_min = 40; |
>= 0 |
|
alpha_max = 60; |
< 90 |
|
beta_min = -1; |
> -90 |
|
beta_max = +1; |
< 90 |
|
len_min = -0.7; |
> -2.0 |
|
len_max = -0.4; |
< 0.0 |
Tab. 4‑1: „Parameter zur Optimierung im Script anpassen“
Die pfeil- und bogenspezifischen Daten, sowie Wind- bzw. Umgebungsparameter und die Zielposition können im Simulink-Blockschaltbild angepasst werden. Wurde nach einem Optimierungsdurchlauf noch kein zufrieden stellendes Ergebnis gefunden, können die Wertebereiche im Script in Orientierung am besten Ergebnis verringert werden, wodurch ein erneuter Aufrufe von „opti“ genauere Resultate liefern wird (schrittweise Annäherung).
Das Optimierungsscript arbeitet nach folgendem Verfahren (Pseudocode):
|
Pseudocode: |
|
Variablen und Parameter initialisieren Parameter-Intervalle berechnen
Wiederhole i-mal: (MonteCarlo-Schleife) { Zufällige Variation der Parameter (Winkel und Zuglänge) Parameter und neuen besten Wert merken } }
Ausgabe des gefundenen Optimums
Simulation mit besten Parametern und Ergebnis Anzeigen
|
Tab. 4‑2: „Pseudocode für das Optimierungsscript“
Im Folgenden wird das Ergebnis einer durchgeführten Optimierung gezeigt:
|
Matlab-Shell: |
|
|
Aufruf des Scripts: Anzahl Durchläufe eingeben: Ergebnisausgabe:
|
>> opti Anzahl der Läufe (z.B. 100): 200 Abweichung: 3.2603 Alpha: 41.0135 Beta: -0.63456 Länge: -0.5471
|
Tab. 4‑3: „Ergebnis nach Optimierungslauf mit 200 Simulationsaufrufen“
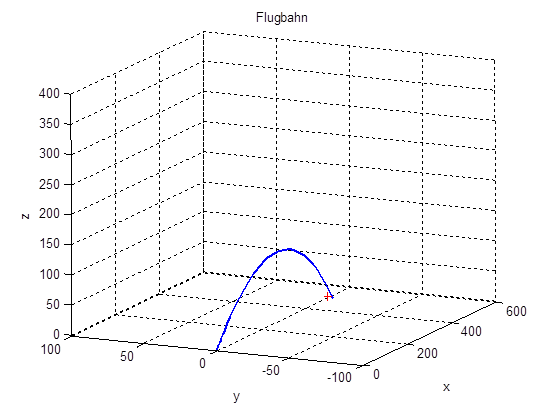
Abbildung 4‑1: „Ergebnis nach Optimierungslauf mit 200 Simulationsaufrufen“
5. Fazit
Mit dem vorliegenden Simulationsmodell kann der Abschuss eines Pfeils mit einem Bogen hinreichend realistisch simuliert werden. Im Vordergrund steht dabei nicht die detaillierte und exakte, physikalische Beschreibung des Prozesses, sondern der Aufbau, die Struktur und Umsetzung des Problems zu einem Simulationsmodell mit Parameteroptimierung. Für eine genauere Beschreibung müssten zumindest die folgenden Aspekte erweitert und ergänzt werden:
- Der CW-Wert ändert sich während der gesamten Flugphase
- Der Pfeil rotiert während des Fluges (Magnus-Effekt), insbesondere durch Federn beeinflusst
- Die Federkonstante des Bogens ist nicht linear
- Die Modellierung von Recurvefaktor und Wirkungsgrad ist nicht linear und stark vom eingesetzten Material abhängig
- Der Pfeilschaft biegt sich während der ersten Meter der Beschleunigung, da das hintere Ende des Pfeils durch die vorschnellende Sehne bereits beschleunigt wird, während der vordere Teil noch ruht (Archer-Paradox)
- Windböen haben in der Realität weder konstante Geschwindigkeiten noch konstante Richtungen. Die Angriffsfläche des Pfeils wurde nicht exakt bestimmt (z.B. wurde die evtl. dickere Pfeilspitze und die Feder ignoriert)
- Die Luftdichte ist abhängig vom Ort, ebenso die Erdbeschleunigung…
6. Anhang
Literaturverzeichnis
Hering; Martin; Stohrer; 2002: Physik für Ingenieure, 8. Auflage, Berlin Heidelberg: Springer, 2002
Beucher, Ottmar, 2002: Matlab und Simulink – Grundlegende Einführung, 2. Aufl., München: Pearson Studium, 2002
Kramer, Ulrich; Neculau, Mihaela, 1998: Simulationstechnik, München; Wien: Hanser, 1998
Quellen im Internet
Homepage der KSG 1359 e.V. (Christian Nentwig), Ballistik,
Internet: http://rz-home.de/~cnentwig/index.html, Abruf 2006-04-08
Homepage von Hans-Dieter Cornelißen, Beschreibung von Schwingungen,
Internet: http://www.hans-dieter-cornelissen.de/Physik/
Harmonische_Schwingung/Beschreibung_von_Schwingungen.htm, Abruf 2006-04-08
Homepage von ARCHERY DIRECT, Pfeil und Bogen
Internet: http://www.archerydirect.de/, Abruf 2006-04-08
Homepage Matroids Matheplanet,
Internet: http://matheplanet.com/default3.html?call=viewtopic.php?topic=31542&amp;amp;amp;amp;start=0&amp;amp;amp;amp;lps=225015&ref=http://www.google.de/search?hlX=de%26qX=luftreibung%26btnGX=Suche%26metaX=, Abruf 2006-04-08
Homepage von Kai Eck, Die LARP-Physik des fliegenden Pfeiles,
Internet: http://mitglied.lycos.de/Gwynned1/pfeilphysik.php, Abruf 2006-04-08
Homepage Wikipedia, Wikimedia Foundation Inc.,Strömungswiderstand,
Internet: http://de.wikipedia.org/wiki/Luftwiderstand, Abruf 2006-04-08
Homepage physics on stage, Der waagerechte Schuss mit Pfeil und Bogen,
Internet: http://www.science-on-stage.de/isc/pos2/abstracts/Exp4/versuch4.htm, Abruf 2006-04-08
Homepage von MacBumm, Dissertation Wundballistik bei Pfeilverletzungen,
Internet: http://www.macbumm.de/04_diss/diss/1.3_diss_grundlagen.htm, Abruf 2006-04-08
Homepage Wikibooks, Wikimedia Foundation Inc., Dynamik
Internet: http://de.wikibooks.org/wiki/Dynamik, Abruf 2006-04-08
Download Dokumentation als PDF
Die Original-Dokumentation zu diesem Projekt liegt auch im Portable Document Format (PDF) vor:
Download PDF-Dokumentation
Kommentare 2
Hallo,
vielen Dank für diesen äußerst umfassenden Artikel. Ich würde mich freuen, wenn Sie mir genauer beschreiben könnten, wie das Blockschaltbild "Bogenbeschleunigung" und - exemplarisch - "Flugphysik_x" gelesen werden muß.
Vielen Dank im Voraus!
S. H.
Hallo, ich bin's nochmal kurz...
Ich wollte noch dazu anmerken, daß ich versuche, das Model in meine Programmiersprache C# zu übersetzen. Die anderen Blockschaltbilder kann ich eigentlich lesen, nur eben die "Bogenbeschleunigung" nicht. In dem Beispiel lese ich noch die Berechnung des Faktors "k" für den Strömungswiderstand heraus =>
var k = 0.5 * Konstanten.CwWert * Konstanten.LuftDichte * Math.Pow(Konstanten.PfeilRadius, 2) * Math.PI;
Wie ich dann den Rest des Blockschaltbildes übersetzen kann, weiß ich jedoch nicht. Ebenso verhält es sich, wie oben bereits geschrieben, mit "Flugphysik_xyz".
Könnten Sie mir bitte weiterhelfen?
Danke und viele Grüße!
S. H.
Neuen Kommentar schreiben: